FPV montáž
Došel jako prvním, tak nejprve jeho instalace.
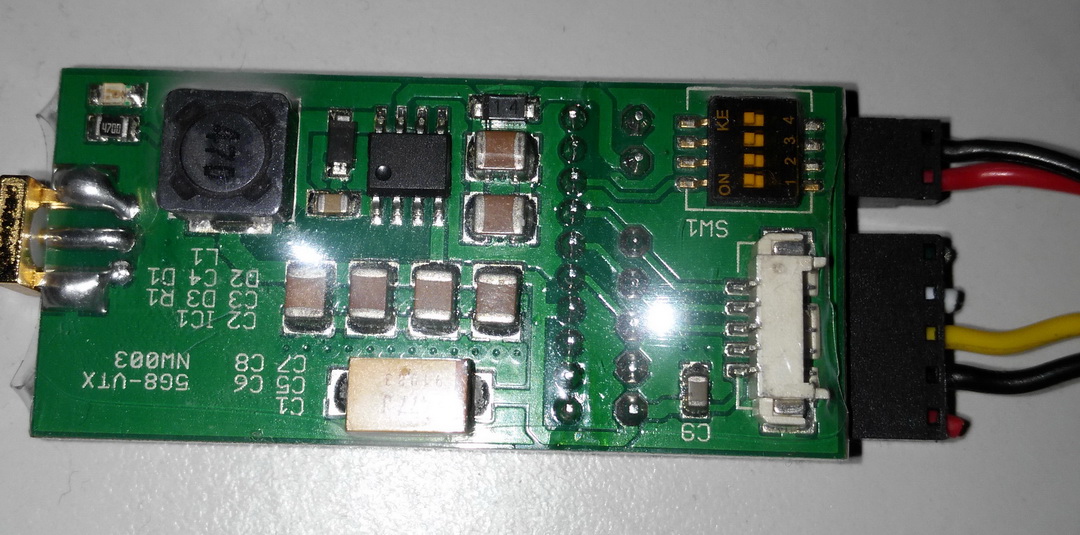
Souprava vypadá po vybalení takto :




manuál zde
zde bylo důležité následující zjištění:
v balení není manuál a v infu na Amazonu, n-Factory a Immersion je uvedeno -

defaultně jsou nastaveny switche ON ON ON ON, což by podle balení bylo RaceBand CH1 5658 MHz
a podle manuálu nebo infa 5740 MHz.
Když jsem to zapojil, tak RX zachytil signál na C-CH3 tzn. 5665 MHz byl ale slabší, tak jsem provedl běkolik pokusů a došel k tomu, co jsem následně ověřil i na forech Amazonu. Přepínače fungují dle příbalového letáku a manuál je starý. Tzn. platí pásmo Race nebo F podle polohy switche 4. Pro mě, ale Race není vhodné, neboť většina frekvencí je mimo možnosti přijímače. Je tedy nutné přepnout na stálo switch 4 do polohy off a potom frekvence TX odpovídají RX, konkrétně skupině D.
Ještě k těm pokusům dodám, že např. frekvence na TX - CH4 (5740MHz) uvedené v letáku a tabulce IRC/Shark (tzn. switche ON ON ON OFF) lze zachytit na RX v B-CH1 (5733 MHz), B-CH2 (5752). D-CH1 (5740 MHz), A-CH7 (5745 MHz), ale přesně je to D-CH1. TAKŽE VŽDY VOLIT SKUPINU D.

4. telemetrie - DJI - mini iOSD

k tomu přísluší instalace SW ovladače pro nastavení pozice údajů na obrazovce, limitů a výstrah (GPS, vzdálenost, výška)

manuál zde
zde pouze podstatné informace
signalizace na krabičce iOSD :

a zde polohy a význam OSD údajů. Poun. ty se ještě míchají v horních rozích s OSD RX-LCD přijímače. Ale rozlišit lze. Bílé jsou Phantom a zelené přijímač.

Podrobný význam signalizace je v manuálu.
Zde jen stručně ?
1.baterie Phatomu, když bliká, tak tentýž význam jako Phantom - blikání červené - first level alert - baterie
2.vzdálenost od startu (Home Pointu)
3.výška oproti startu
4.mod letu ATT, GPS, M
5,typ FailSave FS,GoHome
6.pitch (Up = +, Down = -)
7.roll (Right = +m Left = -)
8.rychlost
9.počet satelitů
10.směr nosu k Home Pointu (míří-li k HP = kosočtverec je ve středu)
11. stoupání, klesání
12.poloha, horizont
13.kompas, když bliká - kalibrovat
14.azimut - odchylka od severu ve směru hodin. ručiček
15.výstraha No-Fly-Zones - bliká
5. kabeláž pomocí Phantom FPV Kitu

Usnadní kabeláž, i když hlavně při použití s TX AVL58, potom není potřeba ani pájení. Ale i pro mě výhoda - hub má jištění proti přetížení a připojení přes hub gimbalu a iOSD je jednoduché. Zbyvá jen propjit hub s vysílačem.
Postup následující :
1. Vytáhne se 8-žil. kabel z gimbalu a zapojí do hub zásuvky gimbal. Z vedlejší zásuvky gimbal se propjí gimbal z hubem. Tzn. dočlo jen k přerušenému propojení Phantom - gimbal přes hub.
2. iOSD se zapojí do malé zásuvky iOSD mini a samotné mini iOSD do CAN zásuvky na noze Phantomu.
3. Přepínač na hubu se dá do polohy OSD.
4. Barevným 4-žil kabelem s jednostrannou zásuvkou se propjí hub s vysílařem nýsledovně :
výstup videa pro vysílač - VTX zásuvka, má tyto barvy pro signály :
 ¨
¨
vstup TX vysílače je takto :

tomu odpovídá kabeláž pro TX vysílač :
VTX zásuvka GND (oranž) > TX zásuvka nápájení (černá)
VTX zásuvka VCC (červ) > TX zásuvka napájení (červ)
VTX zásuvka VIDEO_GND (hnědá) > TX zásuvka 5-pin (černá)
VTX zásuvka VIDEO (žlutá) > TX zásuvka 5-pin (žlutá)
6. DVR rekorder

manuál zde
Zde bude nutno upravit kabeláž :
- kabel napájecí DVR > USB Power banka
- kabel, resp. spojky AV-in, AV-out mezi RX-LCD a DVR
a zde provedeno :

7. Anteny mashroom


